多机械臂协同作业的技术原理与应用分析
·
天津理想动力科技有限公司
天津理想动力科技有限公司位于天津滨海高新区,专注工业机器人集成、拍摄机械臂及VR娱乐机器人研发,提供裸眼3D视频制作服务,深耕智能装备与数字技术领域。公司成立于2014年,依托原厂技术优势,为科研、影视、工业等多行业提供专业解决方案,技术实力与行业经验备受认可。
介绍:
探讨了多机械臂协同作业系统的技术架构与实现路径,重点解析传感网络、智能决策与视觉感知三大核心模块的协同机制。通过工业场景应用案例说明该系统在提升自动化水平方面的价值,并针对当前技术瓶颈提出可行性发展建议。
一、系统架构特征
1. 分布式传感网络构建实时数据交换体系,各机械臂通过力觉、位置等传感器实现环境状态共享
2. 中央控制器采用多智能体决策算法,动态分配任务指令并解决运动轨迹冲突
3. 三维视觉定位系统为协作单元提供毫米级空间坐标参照
二、关键技术实现路径
1. 高精度力矩传感器确保接触作业时的力控精度(±0.1N)
2. 基于强化学习的路径规划算法实现避碰与效率优化
3. 多目视觉系统通过特征匹配实现工件姿态联合解算
三、典型工业应用场景
1. 汽车焊装线上实现多枪同步焊接,节拍时间缩短40%
2. 电子装配环节完成精密部件协同夹持与对位
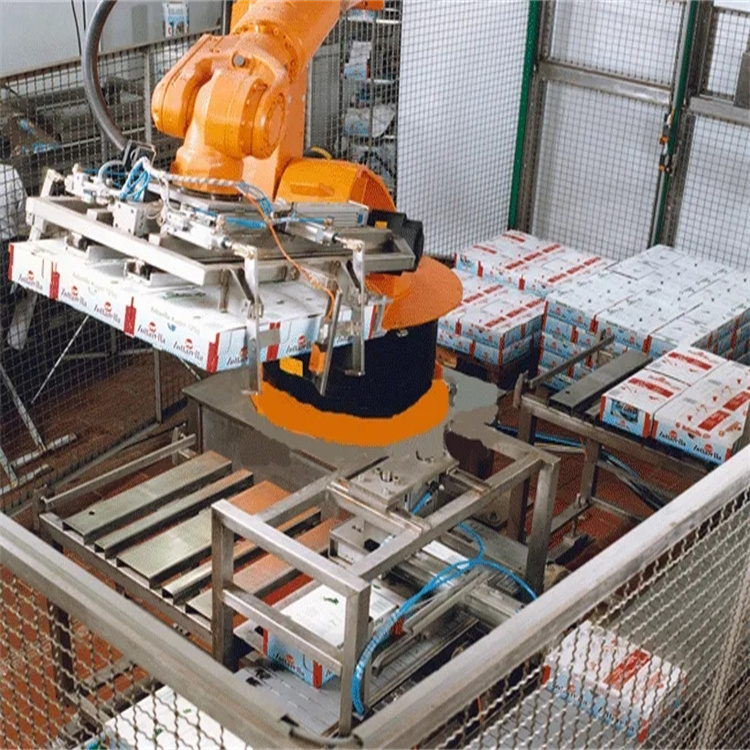
3. 物流分拣系统通过集群作业实现包裹三维码垛
四、现存技术挑战与发展趋势
1. 现有系统在动态障碍物避让响应速度上存在150ms延迟
2. 多机协同精度受网络时延影响仍存在±0.5mm偏差
3. 下一代系统将融合数字孪生技术实现虚实协同控制
4. 5G边缘计算架构有望将系统响应延迟降低至20ms以内
老板们要是想了解更多关于机械臂的产品和信息,不妨去百度搜索“爱采购”,上面有好多相关产品可以参考对比哦,说不定能给你的选择带来新思路~

